- By Swati
- 0 Comment
- 21 Jan 2022
CHAPTER 7 : Introduction To Remote Sensing NCERT SOLUTION CLASS 11TH PRACTICAL WORK IN GEOGRAPHY | EDUGROWN NOTES
Short Answer Type Questions:
Q1.What is a scanner? How does it work?
Answer:
A scanner is usually made up of a reception system consisting of a mirror and detectors. A scanning sensor constructs the scene by recording a series of scan lines. While doing so, the motor device oscillates the scanning mirror through the angular field of view of the sensor, which determines the length of scan lines and is called swath. It is because of such reasons that the mode of collection of images by scanners is referred bit-by-bit. Each scene is composed of cells that determine the spatial resolution of an image. The oscillation of the scanning mirror across the scene directs the received energy to the detectors, where it is converted into electrical signals. These signals are further converted into numerical values called Digital Number (DN Values) for recording on a magnetic tape.
Q2.Explain about different types of sensor resolutions.
Answer:
Remote sensors are characterised by spatial, spectral and radiometric resolutions that enable the extraction of useful information pertaining to different terrain conditions.
1. Spatial Resolution: Spatial resolution of the sensors refers to the capability of the sensor to distinguish two closed spaced object surfaces as two different object surfaces. As a rule, with an increasing resolution the identification of even smaller object surfaces become possible,
2. Spectral Resolution: It refers to the sensing and recording power of the sensor in different bands of EMR (Electromagnetic radiation). Multispectral images are acquired by using a device that disperses the radiation received by the sensor and recording it by deploying detectors sensitive to specific spectral ranges. The principles in obtaining such images is the extension of the dispersion of light in nature resulting in the appearance of the “rainbow”.
3.Radiometric Resolution: It is the capability of the sensor to discriminate between two targets. Higher the radiometric resolution, smaller the radiance differences that can be detected between two targets.
Q3.How can we classify the characteristics of an object?
Answer:
We can group the characteristics of the objects into two broad categories, i.e. image characteristics and terrain characteristics.
- Image Characteristics: The image characteristics include tone or colour in which objects appear, their shape, size, pattern, texture and the shadow they cast.
- Terrain Characteristics: Location and the association of different objects with their surrounding objects constitute the terrain characteristics.
Q4.Differentiate between:
(i) Photographs and images.
Answer:
| Basis | Photograph | Image |
| Meaning | A photograph refers specifically to images that have been recorded on photographic film. | An image refers to pictorial representation, regardless of what regions of energy have been used to detect and record it. |
| Scope | All photographs are images. Therefore it is inclusive in images and its scope is narrow. | All images are not photographs. Images can be: digital images and photographic images. Therefore, its scope is wider. |
(ii) Whiskbroom Scanners and Pushbroom Scanners.
Answer:
Whiskbroom scanners, also sometimes referred to as spotlight or across track scanners, use a mirror to reflect light onto a single detector. The mirror moves back and forth, to collect measurements from one pixel in the image at a time. It is shown below: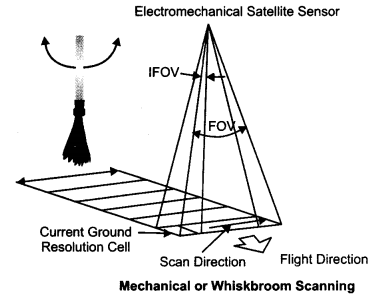
The moving parts make this type of sensor expensive and more likely to wear out.
Pushbroom Scanners:
Pushbroom scanners are also sometimes referred to as along track scanners. It is used a line of detectors arranged perpendicular to the flight direction of the spacecraft. As the spacecraft flies forward, the image is collected one line at a time, with all of the pixels in a line being measured simultaneously. It is shown with the help of following figure. A pushbroom scanner receives a stronger signal than a whiskbroom scanner because it looks at each pixel area for longer. One drawback of pushbroom sensors is that the detectors in the “pushbroom” can have varying sensitivity. If they are not perfectly calibrated, this can result in stripes in the data.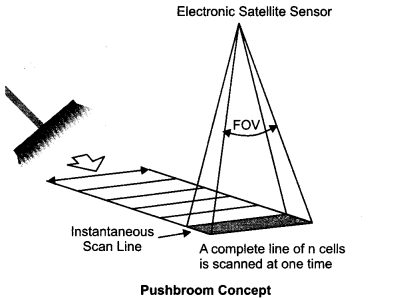
Sensors that use the push broom design include SPOT, IRS, QuickBird, OrbView etc.
(iii) Sun-synchronous (or polar) and geostationary orbits.
Answer:
| Basis | Sun-Synchronous | Geostationary Orbits |
| Location | Satellites in this orbit provide medium to high resolution images of the whole earth which are mostly used for environmental monitoring. They orbit at altitudes of 300 to 1,400 km above earth. | Geostationary orbits are located about 36,000 km above the earth. |
| Revolution time | With every satellite orbit which takes about 90 min, the earth is rotating a bit further resulting in the fact that the satellite is “watching” different sections of the earth in narrow bands. Days or weeks later, the satellite orbits again above the same section. | At this altitude a satellite needs exactly 24 hours to orbit around the earth, the same time the earth takes to perform a complete revolution around its axis. |
| Expansion | It is expaided from 81 degree north to 81 degree south latitude. | It is expanded on one third of the globe. |
| Example | The US LANDSAT series is a well known example of a polar orbiting satellite. | METEOSAT is one example for a geostationary satellite. |
| Utility | It is important for earth resources | It is important for telecommunication and weather department. |
(iv) Photographic and non-photographic sensors.
Answer:
| Basis | Photographic sensors | Non-photographic Sensors |
| Meaning | A photographic sensor (camera) records the images of the objects at an instance of exposure. | A non-photographic sensor obtains the images of the objects in bit-by-bit form. These sensors are known as scanners. |
| Device | It is done through camera | It is done through scanners |
| Other name | It is also called Analogue sensors | It is also called digital sensors. |
(v) Photographic image and digital image
Answer:
| Basis | Photographic Image | Digital Image |
| Meaning | Photographs are acquired in the optical regions of the electromagnetic spectrum, i.e. 0.3 – 0.9 pm. | A digital image consists of discrete picture elements called pixels. Each one of the pixels in an image has an intensity value and an address in two dimensional image space. |
| Colour | Four different types of light sensitive film emulsion bases are used to obtain photographs. These are black and white, colour, black and white infrared and colour infrared. | It does not require any film. |
Long Answer Type Questions:
Q1.How does remote sensing help in the collection of information about the properties of the objects and phenomena of the earth surface?
Answer:
Remote sensing help in the collection of information about the properties of the objects and phenomena of the earth surface:
1. Source of Energy: Sun is the most important source of energy used in remote sensing.
2. Transmission of Energy from the Source to the Surface of the Earth:
The energy that emanates from a source propagates between the source and the object surface in the form of waves of energy at a speed of light (300,000 km per second). Such energy propagation is called Electromagnetic Radiation (EMR).
3. Interaction of Energy with the Earth’s Surface: The propagating energy finally interacts with the objects of the surface of the earth. This leads to absorption, transmission, reflection or emission of energy from the objects.
4. Propagation of Reflected/Emitted Energy through Atmosphere: When energy is reflected from objects of the earth’s surface, it re-enters into the atmosphere.
5. Detection of Reflected/Emitted Energy by the Sensor: The sensors recording the energy that they receive are placed in a near-polar sun-synchronous orbit at an altitude of 700 – 900 km. These satellites are known as remote sensing satellites (e.g. Indian Remote Sensing Series). As against these satellites, the weather monitoring and telecommunication satellites are placed in a Geostationary position (the satellite is always positioned over its orbit that synchronizes with the direction of the rotation of the earth) and revolves around the earth (coinciding with the direction of the movement of the earth over its axis) at an altitude of nearly 36,000 km (e.g. INSAT series of satellites).
6. Conversion of Energy Received into Photographic/Digital Form of Data: The radiations received by the sensor are electronically converted into a digital image. It comprises digital numbers that are arranged in rows and columns. These numbers may also be converted into an analogue (picture) form of data product. The sensor onboard an earth¬orbiting satellite electronically transmits the collected image data to an Earth Receiving Station located in different parts of the world.
7. Extraction of Information Contents from Data Products: After the image data is received at the earth station, it is processed for elimination of errors caused during image data collection. Once the image is corrected, information extraction is carried out from digital images using digital image processing techniques and from analogue form of data products by applying visual interpretation methods.
8. Conversion of Information into Map/Tabular Forms: The interpreted information is finally delineated and converted into different layers of thematic maps. Besides, quantitative measures are also taken to generate tabular data.
Q2.Explain about different types of multispectral scanners.
Answer:
In satellite remote sensing, the Multi-Spectral Scanners (MSS) are used as
sensors. These sensors are designed to obtain images of the objects while sweeping across the field of view.
The Multi-Spectral Scanners are divided into the following types:
- Whiskbroom Scanners
- Pushbroom Scanners
1. Whiskbroom Scanners: The whiskbroom scanners are made up of a rotating mirror and a single detector. The mirror is so oriented that when it completes a rotation, the detector sweeps across the field of view between 90° and 120° to obtain images in a large number of narrow spectral bands ranging from visible to middle infrared regions of the spectrum. The total extent of the oscillating sensor is known as the Total Field of View (TFOV) of the scanner. While scanning the entire field, the sensor’s optical head is always placed at a particular dimension called the Instantaneous Field of View (IFOV).
2. Pushbroom Scanners: The pushbroom scanners consist of a number of detectors which are equivalent to the number obtained by dividing the swath of the sensor by the size of the spatial resolution. In pushbroom scanner, all detectors are linearly arrayed and each detector collects the energy reflected by the ground cell (pixel) dimensions of 20 metres at a nadir’s view. For example, the swath of High-Resolution Visible Radiometer – 1 (HRVR – 1) of the French remote sensing satellite SPOT is 60 km and the spatial resolution is 20 metres. If we divide 60 km x 1000 metres/20 metres, we get a number of 3000 detectors that are deployed in SPOT HRV – 1 sensor.
Q3.Based upon the mechanism used in detecting and recording, in how many categories can we classify the remotely sensed data products?
Answer:
Based upon the mechanism used in detecting and recording, these may be broadly classified into two types:
- Photographic Images
- Digital Images
1. Photographic Images: Photographs are acquired in the optical regions of electromagnetic spectrum, i.e. 0.3-0. 9 pm. Four different types of light sensitive film emulsion bases are used to obtain photographs. These are black and white, colour, black and white infrared and colour infrared. However, in aerial photography black and white film is normally used. Photographs may be enlarged to any extent without loosing information contents or the contrast.
2. Digital Images: A digital image consists of discrete picture elements called pixels. Each one of the pixels in an image has an intensity value and an address in two-dimensional image space. A digital number (DN) represents the average intensity value of a pixel. It is dependent upon the electromagnetic energy received by the sensor and the intensity levels used to describe its range. In a digital image, the reproduction of the details pertaining to the images of the objects is affected by the size of the pixel. A smaller size pixel is generally useful in the preservation of the scene details and digital representation. However, zooming of the digital image beyond certain extent produces loss of information and the appearance of pixels only. Using a digital image processing algorithms, the digital numbers representing their intensity level in an image may be displayed.
Q4.Explain various elements of visual interpretation.
Answer:
Elements of Visual Interpretation Whether we are conscious of it or not we use the form, size, location of the objects and their relationships with the surrounding objects to identify them in our day-to-day life. These characteristics of objects are termed as elements of visual interpretation.
1. Tone or Colour: All objects receive energy in all regions of spectrum. The interaction of EMR with the object surface leads to the absorption, transmittance and reflection of energy. It is the reflected amount of the energy that is received and recorded by the sensor in tones of grey, or hues of colour in black and white, and colour images respectively. The variations in the tone or the colour depend upon the orientation of incoming radiations, surface properties and the composition of the objects.
2. Texture: The texture refers to the minor variations in tones of grey or hues of colour. These variations are primarily caused by an aggregation of smaller unit features that fail to be discerned individually such as high density and low density residential areas; slums and squatter settlements; garbage and other forms of solid waste; and different types of crops and plants. The textural differences in the images of certain objects vary from smooth to coarse textures.
3. Size: The size of an object as discerned from the resolution or scale of an image is another important characteristic of individual objects. It helps in distinctively identifying the industrial and industrial complexes with residential dwellings.
4. Shape: The general form and configuration or an outline of an individual object provides important clues in the interpretation of remote sensing images. The shape of some of the objects is so distinctive that make them easy to identify. For example, the shape of the Sansad Bhawan is typically distinct from many other built- up features.
5. Shadow: Shadow of an object is a function of the sun’s illumination angle and the height of the object itself. The shape of some of the objects is so typical that they could not be identified without finding out the length of the shadow they cast. For example, the Question utub Minar located in Delhi, minarets of mosques, overhead water tanks, electric or telephone lines, and similar features can only be identified using their shadow.
6. Pattern: The spatial arrangements of many natural and man-made features show repetitive appearance of forms and relationships. The arrangements can easily be identified from the images through the utilisation of the pattern they form. For example, planned residential areas with the same size and layout plan of the dwelling units in an urban area can easily be identified if their pattern is followed.
7. Association: The association refers to the relationship between the objects and their surroundings along with their geographical location. For example, an educational institution always finds its association with its location in or near a residential area as well as the location of a playground within the same premises.